
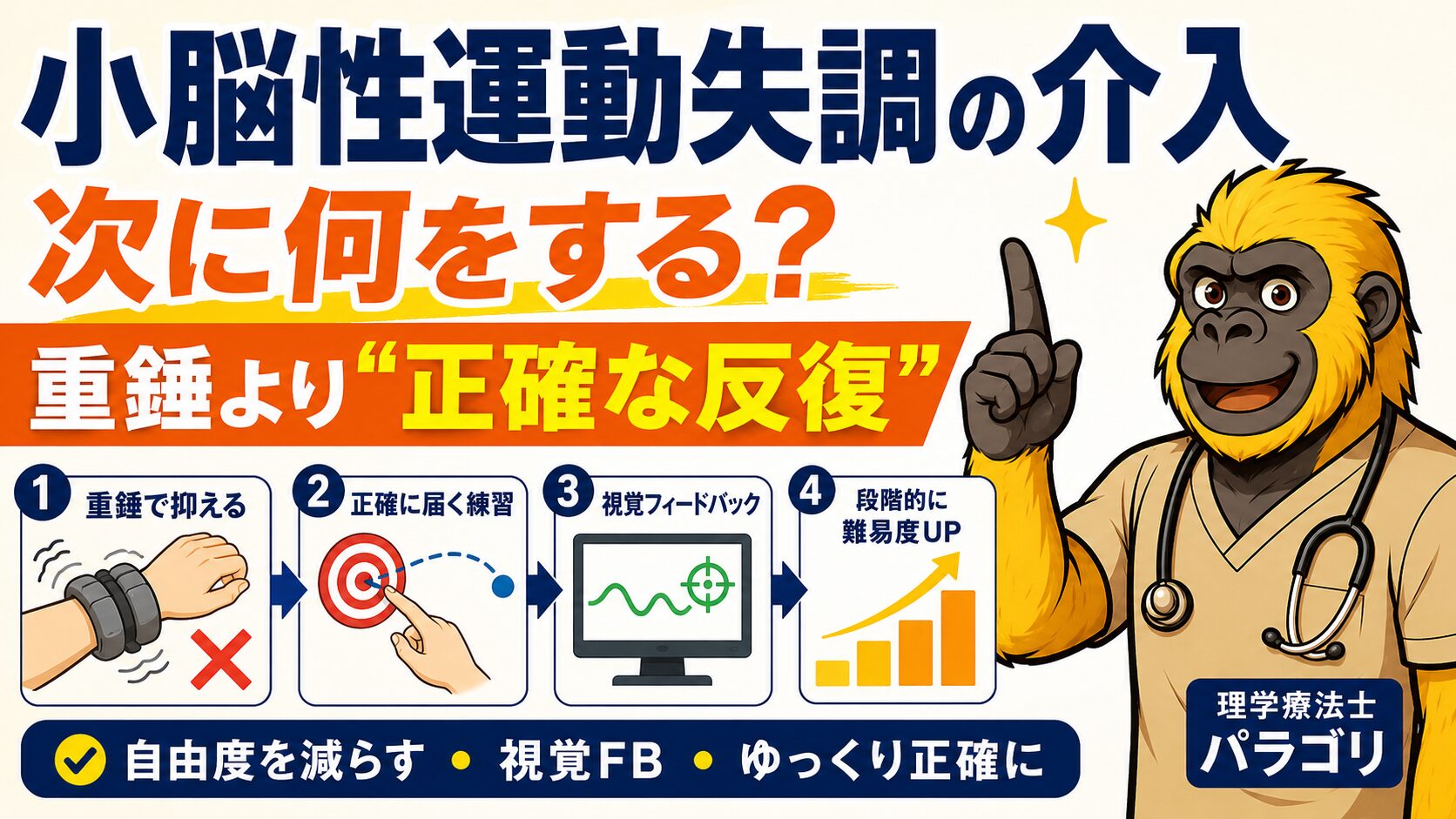
評価で「小脳性運動失調」と判断できた。では、次に何をするか。
ここで多くの若手PTが迷います。「バランス練習をすればいいのか」「筋力をつければ改善するのか」「とりあえず反復すればいいのか」——答えは、どれも半分正しく、半分間違っています。
小脳性運動失調への介入は、「内部モデルを再構築するための条件を整える」ことが中心です。やみくもな反復ではなく、小脳が正確な予測と誤差修正を学習できる環境を設計することが求められます。
介入の前提:小脳は「正確な運動の経験」から学ぶ
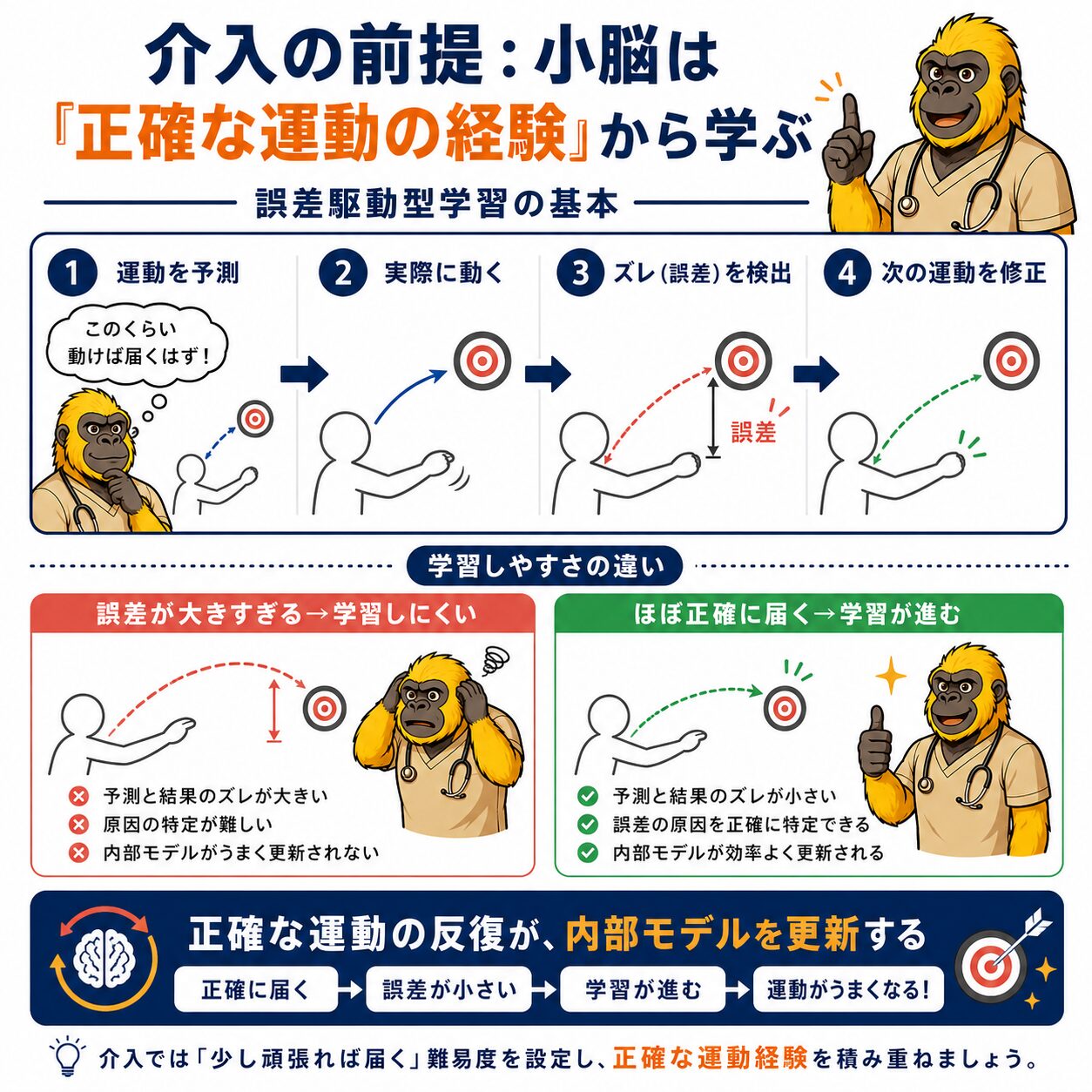
小脳の内部モデルは、「予測した軌道」と「実際の軌道」のズレ(誤差)を検出し、次の運動に反映させることで更新されます。これを誤差駆動型学習(Error-based learning)といいます。
ここから導かれる介入の原則は2つです。
- 誤差が大きすぎると学習が進まない:誤差が過大な環境では、小脳は修正のパターンを見つけられず、混乱が積み重なります。
- 正確な運動の反復が内部モデルを更新する:「ほぼ正確に届く」経験の蓄積が、予測精度を高めます。
つまり介入の設計は、「誤差が大きすぎず、正確な運動が起きやすい条件を作る」ことから始まります。
なぜ重錘は推奨されないのか
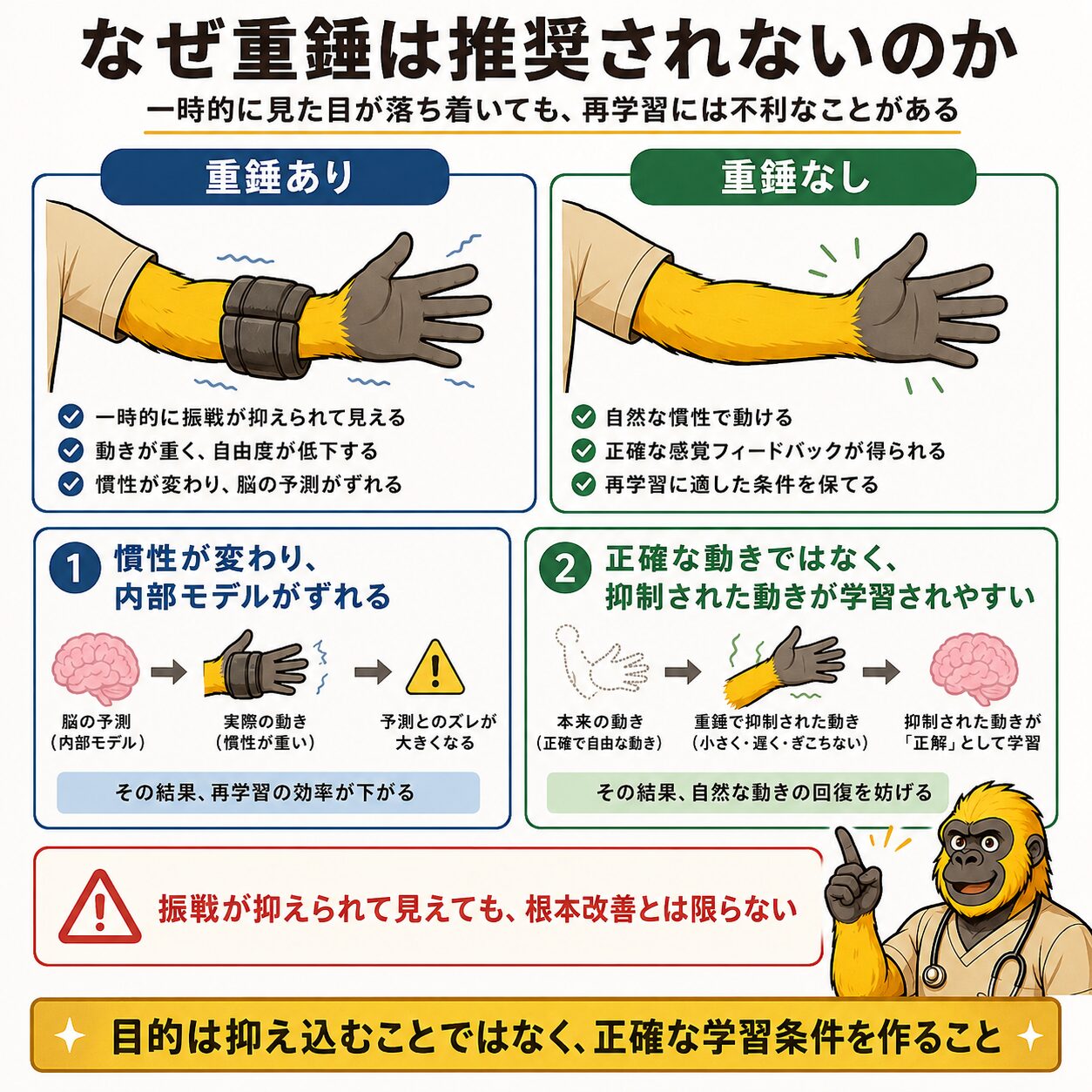
小脳性運動失調に対して重錘を使用する場面が臨床では見られます。一時的に振戦が抑制されるように見えることもあります。しかし、これは根本的な改善ではなく、以下の理由から再学習を妨げる可能性があると考えられています。
①慣性が変わり、内部モデルがずれる
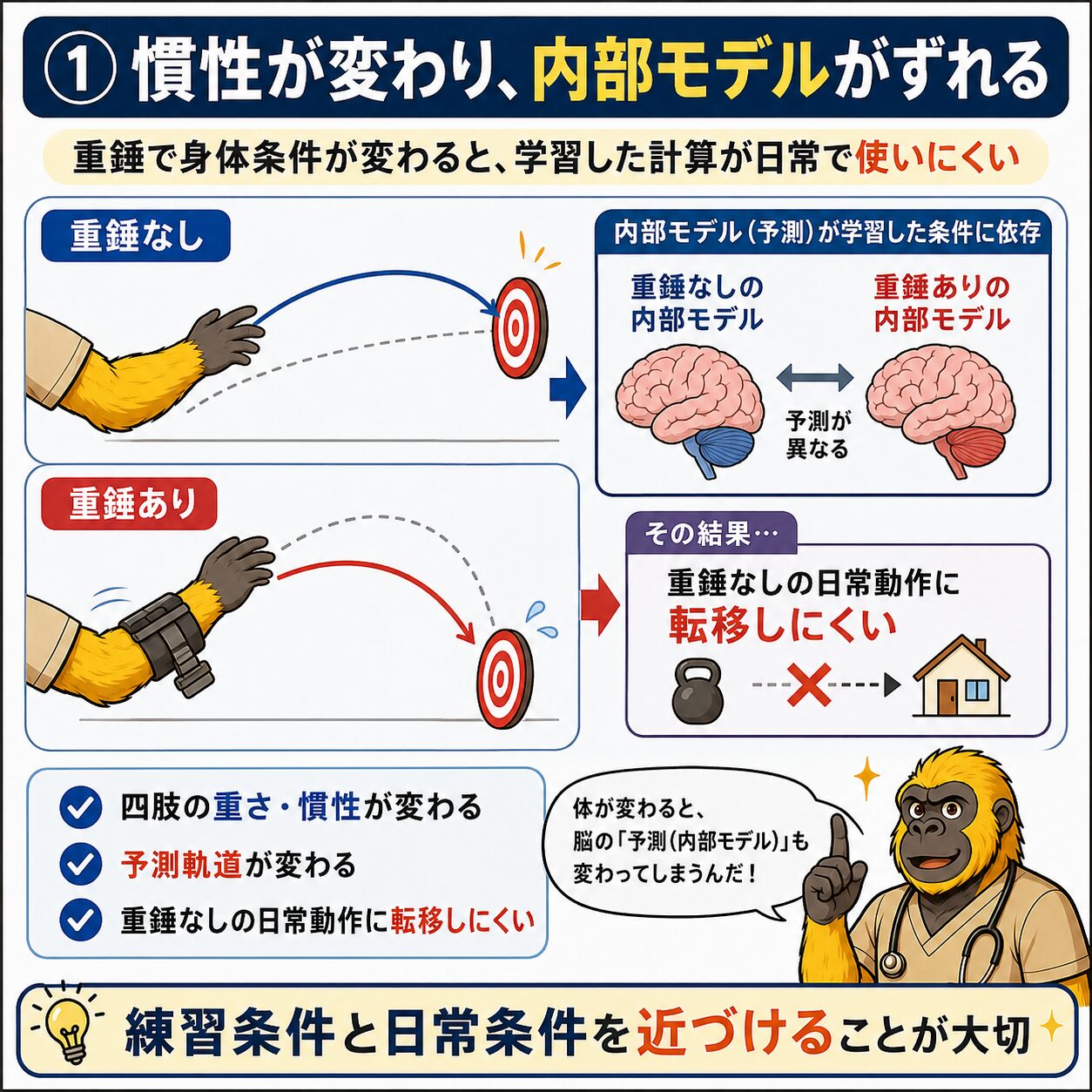
小脳の内部モデルは、四肢の慣性・重さ・関節特性を前提として構築されています。重錘を装着すると、この前提条件が変わります。重錘ありの状態で形成された計算モデルは、重錘なしの日常動作では使えません。
②「正確な動き」ではなく「抑制された動き」が学習される
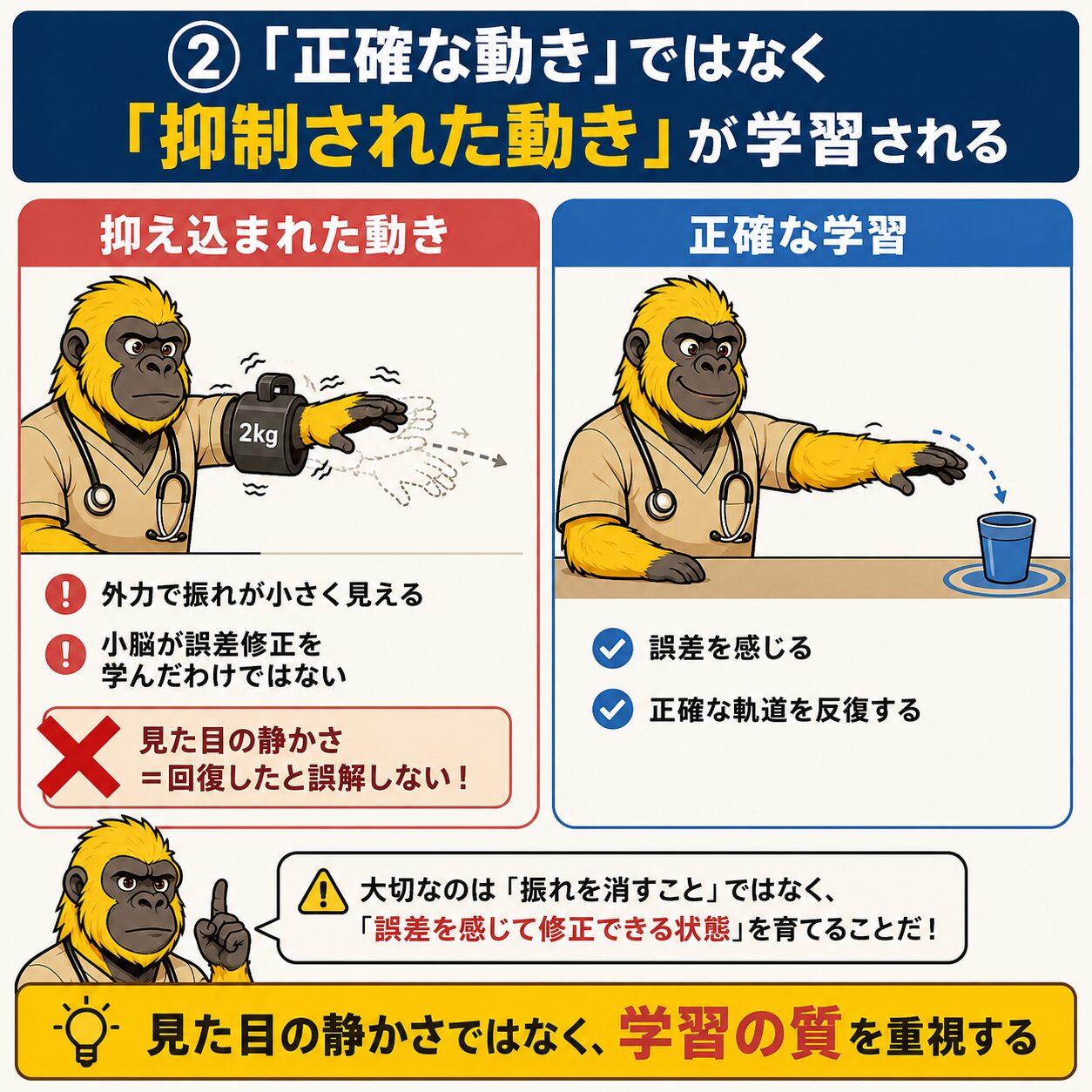
重錘は振戦を機械的に抑える効果がありますが、これは小脳が誤差を正しく修正した結果ではありません。外力で動きを押さえつけているだけです。小脳が「正確な運動の経験」として記憶すべき情報が得られないまま練習が進むことになります。
エビデンスとしても、重錘療法が小脳性運動失調の長期的改善に有効であるという強い根拠は現時点では示されていません。
介入の柱1:自由度を減らして計算コストを下げる
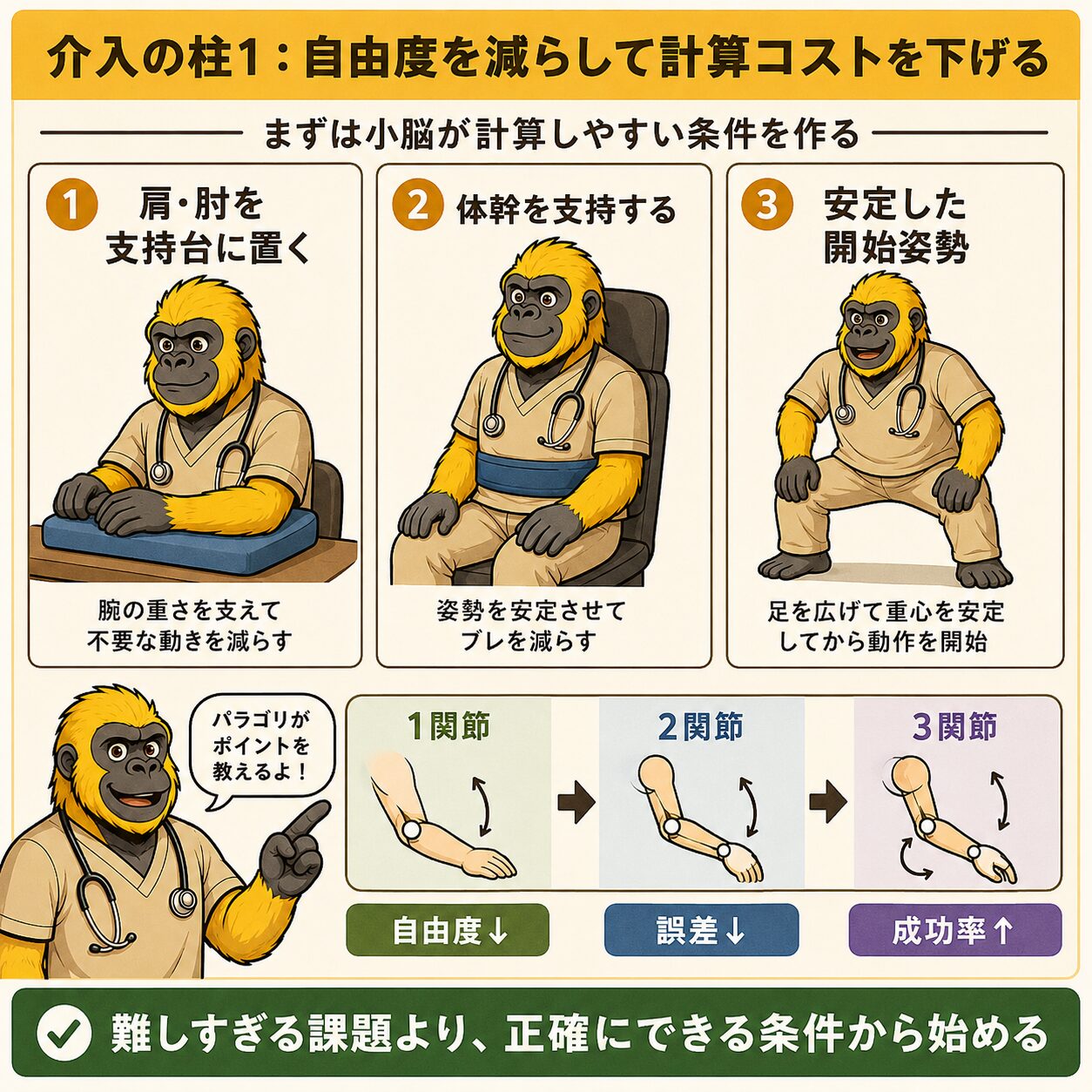
小脳が同時に処理しなければならない関節の数(自由度)を減らすことで、内部モデルの構築を助けます。
具体的な方法
- 肩・肘を支持台に置く:近位部を固定することで、遠位(手関節・指)の動きに集中できる環境を作る。
- 体幹を支持する:体幹失調が合併している場合、座位での支持を増やして四肢の課題に集中させる。
- 課題の開始肢位を安定させる:不安定な姿勢から始めず、支持基底面の広い安定した姿勢から課題を設定する。
段階的な考え方としては、「まず1関節で正確な運動が出来るか」→「2関節に増やす」→「3関節を統合する」という順序が有効です。
介入の柱2:視覚フィードバックを活用する
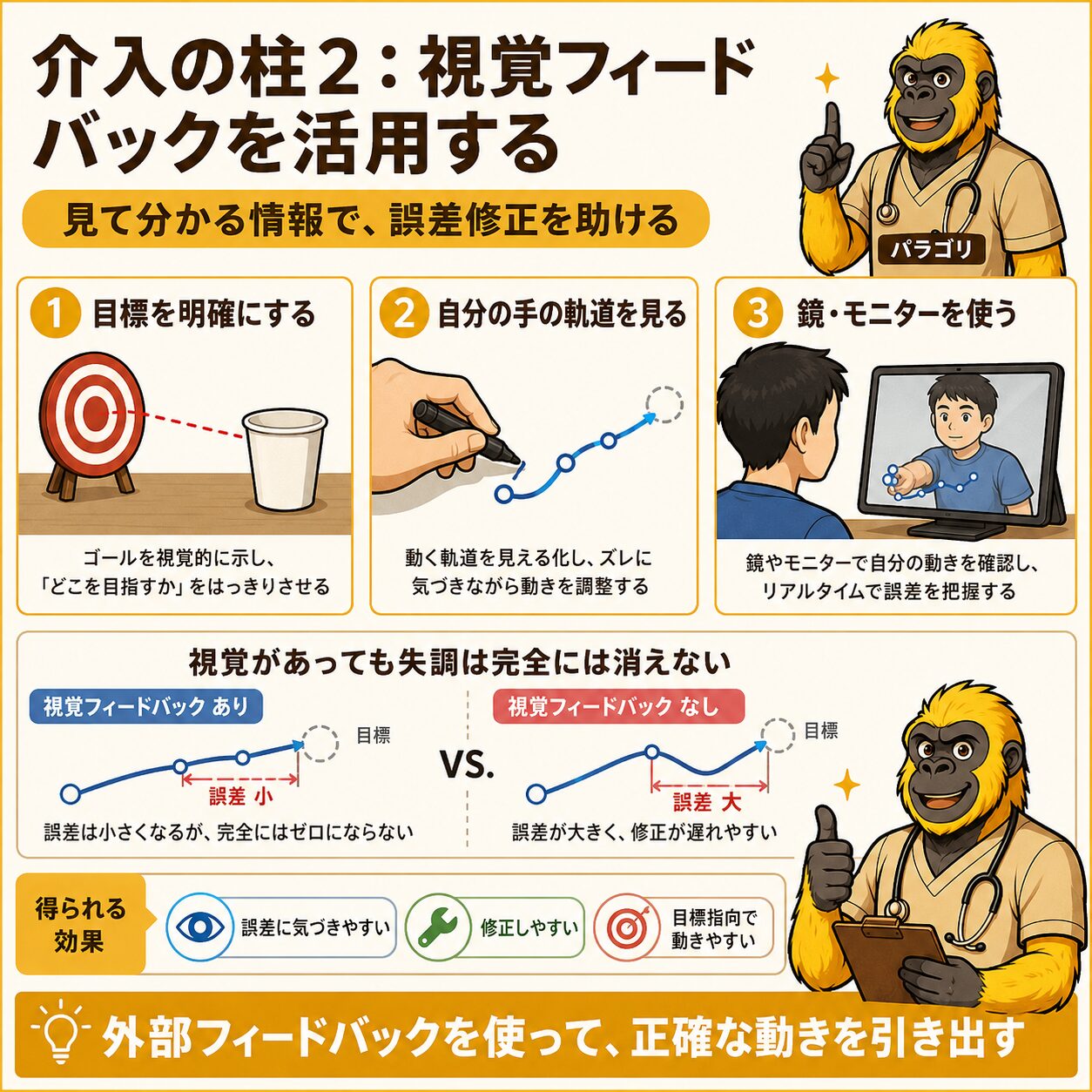
小脳性運動失調では内部モデルが機能しにくいため、外部からのフィードバック(特に視覚)を活用することで運動の修正を補助できます。
- 目標を明確に設定する:「あそこにあるコップに触れる」という明確な視覚的目標は、目標指向型の運動を引き出しやすくします。
- 軌道を視覚で確認しながら動く:自分の手の軌道を見ながらゆっくり動くことで、誤差を自覚しやすくなります。
- 鏡やモニターを使う:自身の動きを客観的に観察できる環境を作ることも有効な場合があります。
ただし、視覚代償への過度な依存は感覚性運動失調への介入と混同しやすい部分もあります。小脳性では視覚情報があっても失調が完全には消えない点を忘れないでください。
介入の柱3:ゆっくり・正確に・反復する
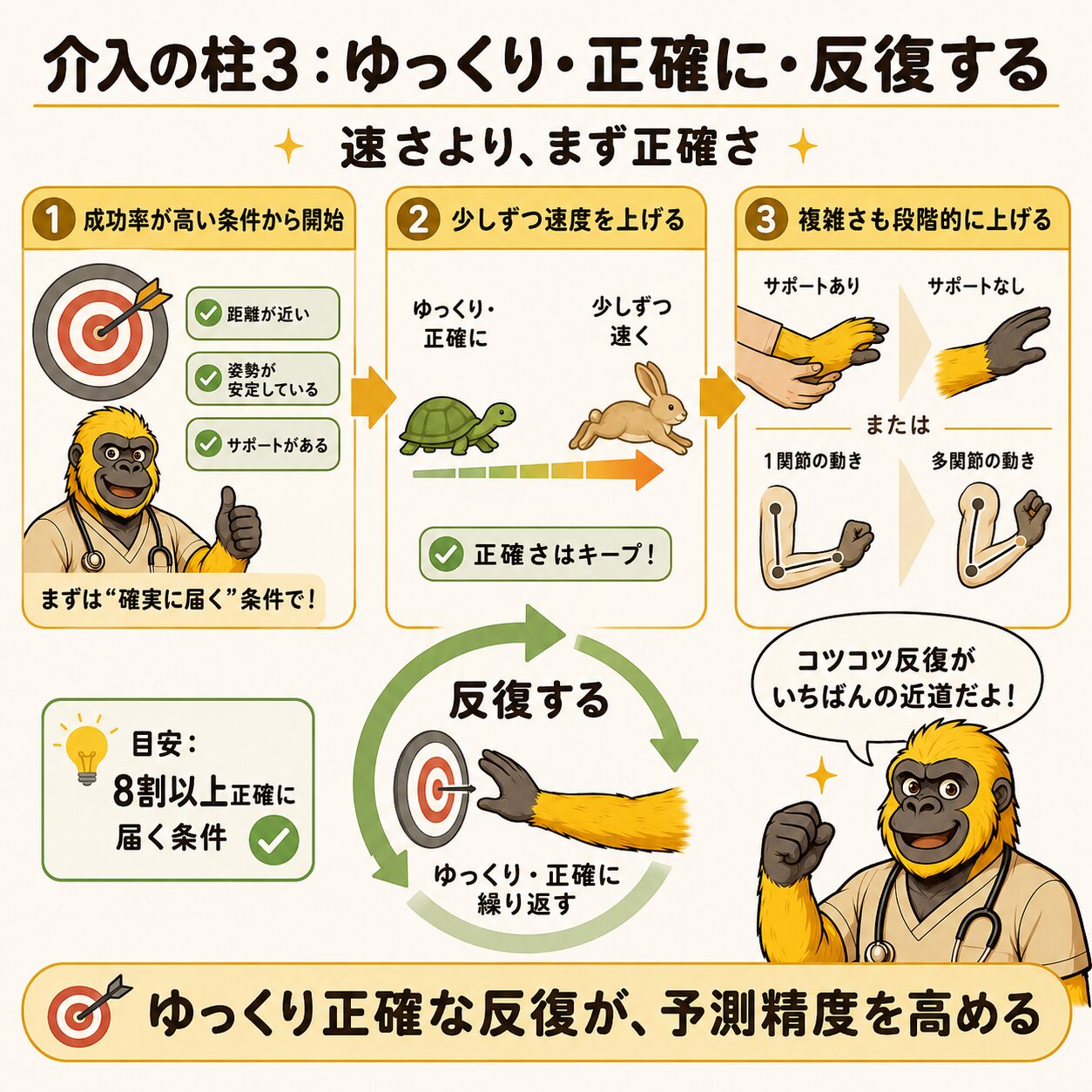
小脳性運動失調では、動作速度が上がるほど誤差が増大します。これは内部モデルの処理速度に限界があるためです。介入では、「ゆっくりで正確な到達が達成される速度」から始めることが原則です。
反復練習の設計
- 成功率が高い速度・難易度から始める:誤差が小さい状態で反復を積む。「8割以上正確に届く」条件が目安。
- 速度を徐々に上げる:ゆっくりで安定したら、少しずつスピードを上げていく。
- 課題の複雑さを段階的に上げる:単関節→多関節、支持あり→支持なし、視覚あり→視覚なし。
運動学習の観点から、変動練習(異なる目標・条件を混ぜる)は長期的な汎化に有効とされています。一定の正確さが身についた後は、目標の位置や速度を少しずつ変化させることも検討します。
介入の流れ:4ステップで組み立てる
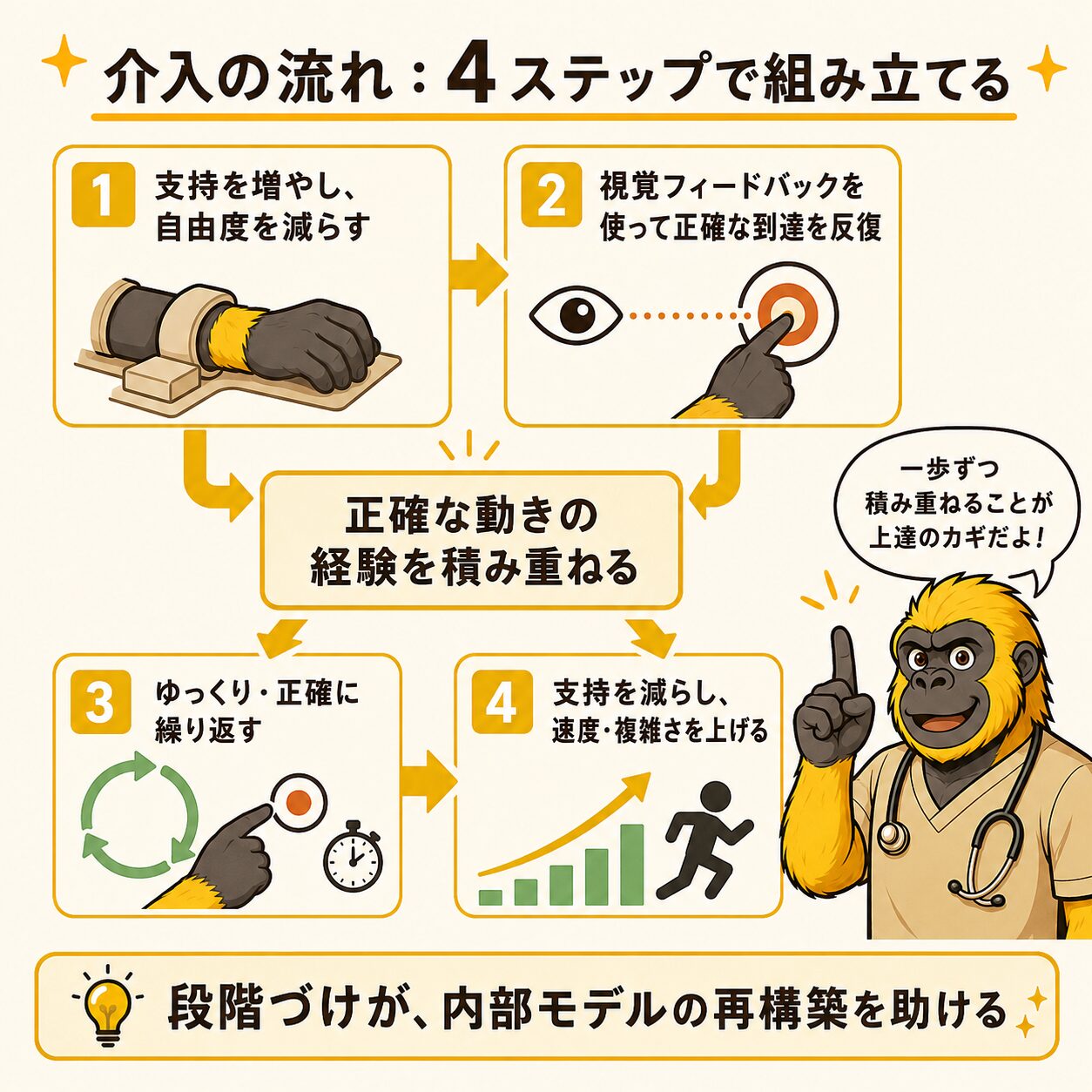
- 支持を増やして自由度を減らす(土台を作る)
- 視覚フィードバックを活用しながら正確な到達を反復する(計算をシンプルに)
- ゆっくり・正確に繰り返す(正確な運動経験を積む)
- 徐々に支持を減らし、速度・複雑さを上げる(段階的にチャレンジ)
この流れは、小脳の誤差駆動型学習が機能しやすい環境を段階的に整えるプロセスです。「正確な動きの経験」を積み重ねることが、内部モデルの再構築につながります。
アウトカム設定:何で効果を判断するか
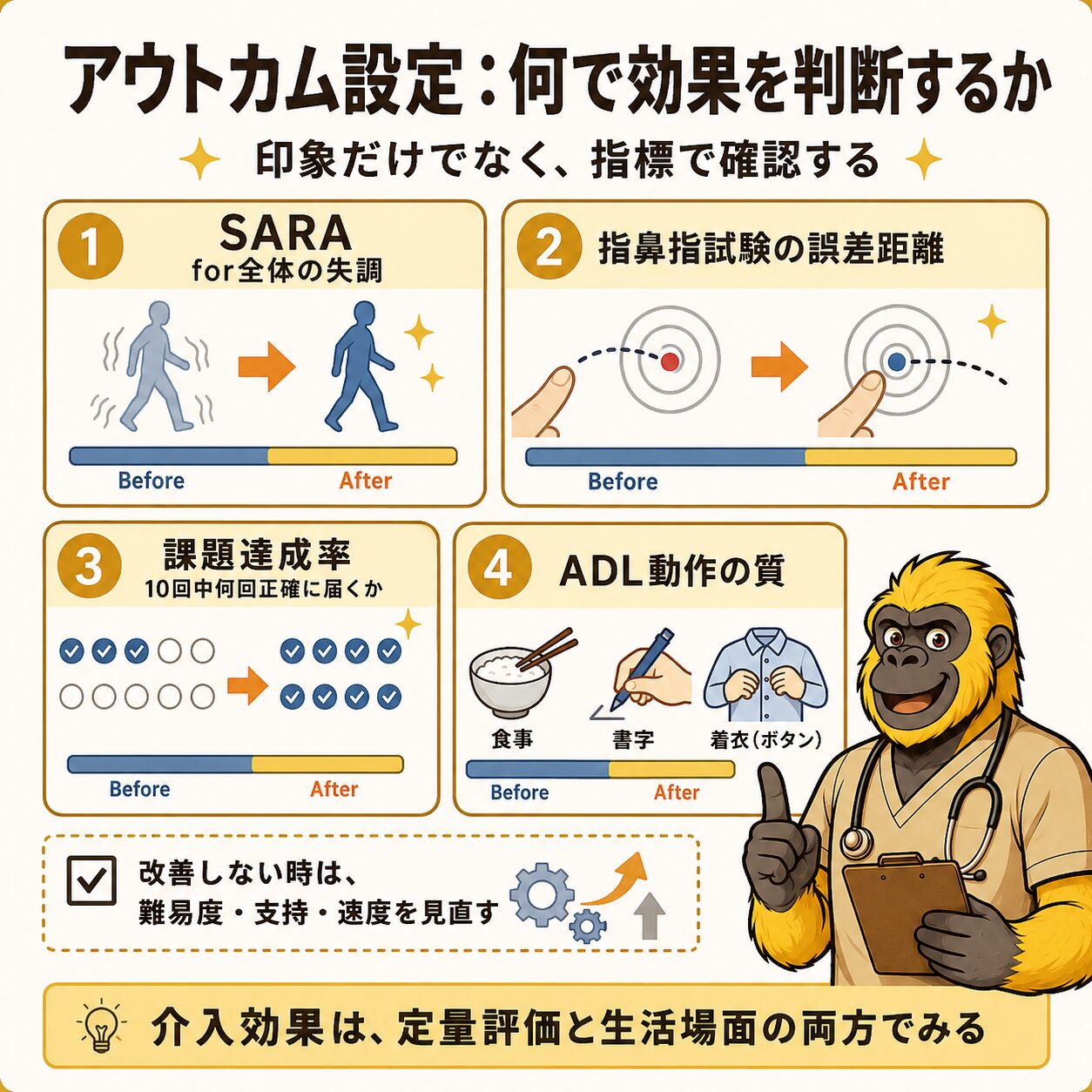
介入の効果は、主観的な印象だけでなく定量的な指標で確認することが重要です。
- SARA:介入前後のスコア変化で全体的な失調の程度を追う
- 指鼻指試験の誤差距離:測定異常の改善を視覚的・定量的に確認
- 課題達成率:「10回中何回正確に到達できたか」などの課題固有の指標
- ADL動作の質:食事・書字・ボタン操作など日常動作への汎化を確認
効果が見られない場合は、「課題の難易度が高すぎないか」「支持が十分か」「速度が速すぎないか」を再確認します。
まとめ
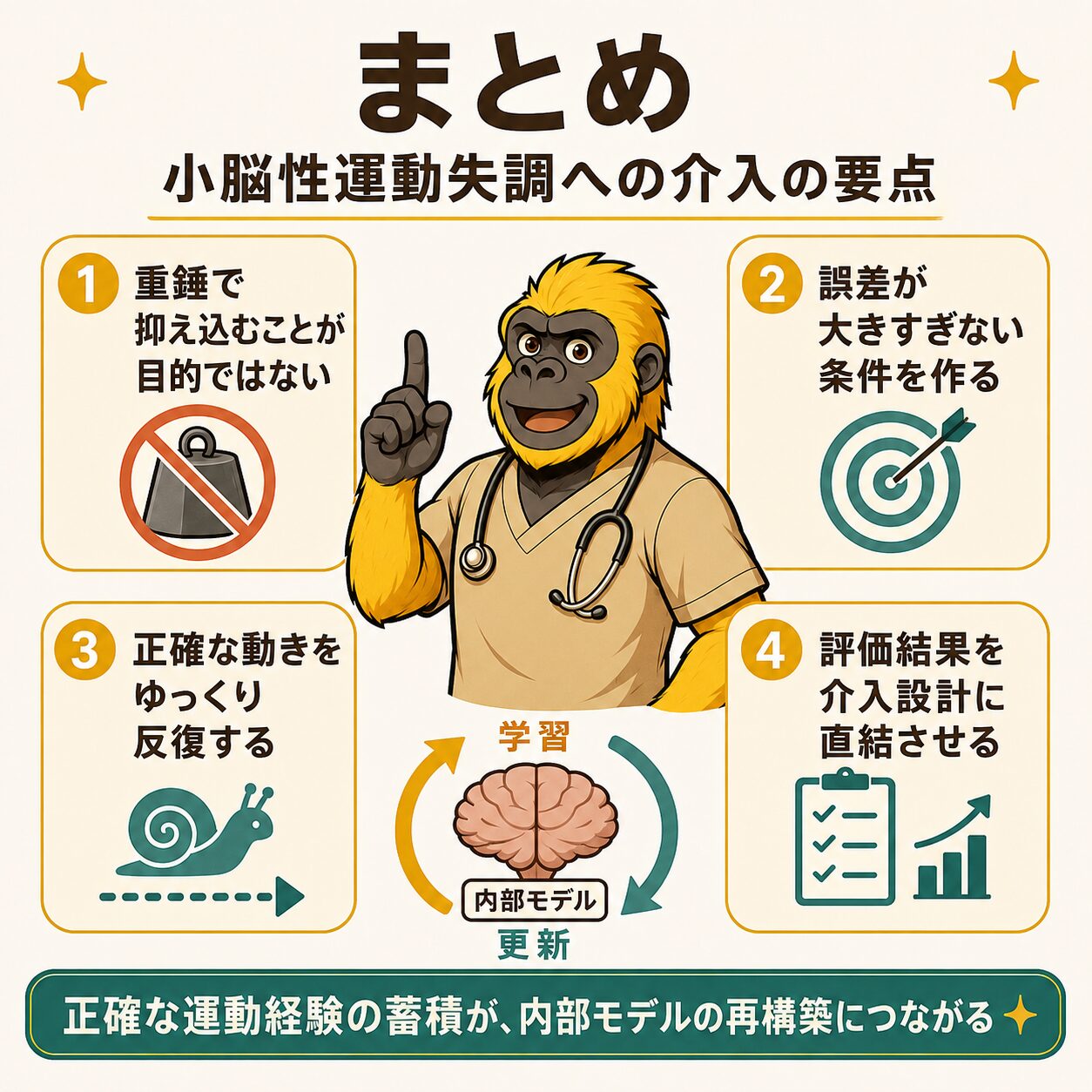
小脳性運動失調への介入は、「抑え込む」でも「ひたすら反復させる」でもありません。
誤差が大きすぎない条件を設計し、正確な運動が起きやすい環境で反復を積む。これが小脳の誤差駆動型学習を活かした介入の核心です。
重錘で一時的に振戦を抑えることが目的ではなく、内部モデルが「正確な軌道とはこれだ」と学習できる経験を積み重ねることが目標です。評価で得た情報(どの関節で、どのくらいの自由度で、どんな速度で破綻するか)を介入設計に直結させる、それが臨床推論の質です。
コメント